Teacher Version
Container Handling Rules
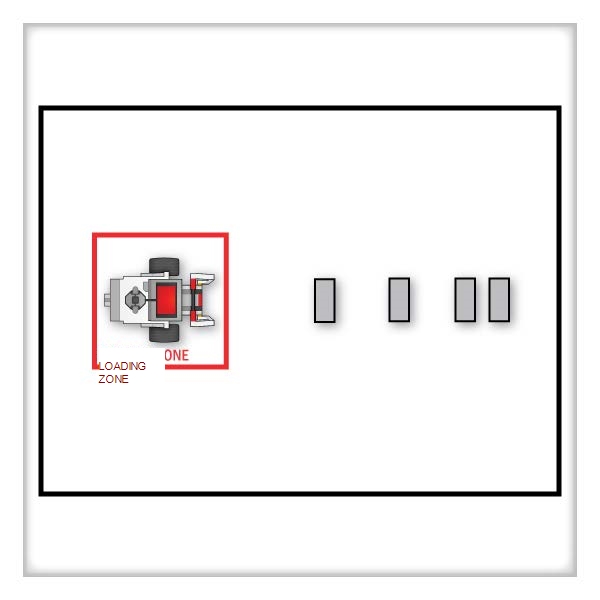
In this challenge, you will use a Loop to program your robot to move a series of containers into a loading zone. The containers to be loaded are placed at irregular intervals, so you will have to use a sensor to detect each one. The robot should then use its arm to transport the container back into the loading zone – marked with a red outline – and release it there.
Rules and Procedures:
- Use four rectangular objects to represent the four containers. These can be built with LEGO parts, or cut from cardboard boxes.
- The four objects must be placed in a straight line at the start of each run, with a flat side facing the robot, but their distance from each other should be varied randomly.
- The drop-off area for the containers should be marked with red electrical tape. If red is not available, any color may be substituted as long as it is different from the color of the table surface.
- A container with no parts hanging outside the loading area may be removed by hand to make room for the next container.
- The robot must return all four containers reliably to the loading area, regardless of where they were located along the initial line.
Hints:
- Use a Loop to repeat similar portions of the behavior. You should not have to write all four runs separately!
- If the robot needs to perform any actions prior to the loop, simply place them before the Loop in the program.
- If the robot needs to perform any actions after the loop, simply place them after the Loop in the program.
- Use Sensors to help the robot locate both the containers and the loading zone, as the exact distances required will be different each time the robot runs!